DEMOSTRACIONES TÉCNICAS PRESENTADAS AL
II SIMPOSIO EN DESARROLLO DE SOFTWARE 2008
24-27 de Junio de 2008
|
|
||||||||
|
- Maqueta Domótica Programable a Través de Microcontroladores Java. Si tenías pensado comprobar cómo puede ser tu hogar del siglo XXI, en esta demo podrás experimentar y lo que es mejor programar sencillo dispositivos como bombillas, sensores de presencia, sensores de iluminación, climatizadores, sensores de humo, etc. Tan solo necesitas un lenguaje de programación (Java en nuestro caso), la librería JDOMO, y, por supuesto, la maqueta domótica.
- Controla tu Hogar con el Sistema de Control Domótico. Con esta experiencia podrás comprobar lo fácil que puede ser controlar toda tu casa digital mediante cualquier dispositivo móvil. Te proponemos que traigas tu móvil y después de descargar la aplicación Java que te pasaremos, modifiques a tu gusto las condiciones de una vivienda a escala.
- Sun SPOT: Una Mota de Polvo Programada en Java. Las redes inalámbricas son ya una realidad. Las posibilidades que se abren en su utilización son ilimitadas, y auguran la factibilidad de visiones como la computación ubicua de Weiser. En esta demostración podrás ponerte al volante de un formula 1, y comprobar de primera mano la telemetría de tu bólido para analizar tus habilidades de piloto.
- JAHASE, una Plataforma para Dominarlos a Todos (Programación en Java sobre Sistemas Empotrados). En esta demostración se prueba que el eslogan WORA (Write Once, Read Anywhere) de JAVA es posible también para el mundo de los sistemas con limitados recursos en memoria y procesamiento, y no solo en los sistemas de escritorio, gracias a la plataforma JAHASE (Java para el Control del Hardware en Sistemas Empotrados).
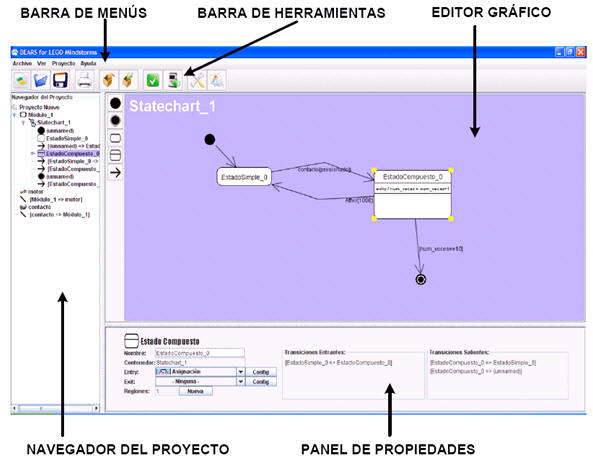
- Diseña una Aplicación de Control Robótico y Herramientas de Modelado. La programación de robots presenta desafíos desde el punto de vista docente y de investigación. En esta demostración se presentan varias posibles alternativas para la programación de robots móviles: utilizando un lenguaje de programación como Java, utilizando una herramienta CASE basada en el uso de máquinas de estados (denominado Bears), y utilizando un herramienta de control remoto para la programación sencilla del comportamiento de robots (denominado LegoModelTools).
|
||||||||